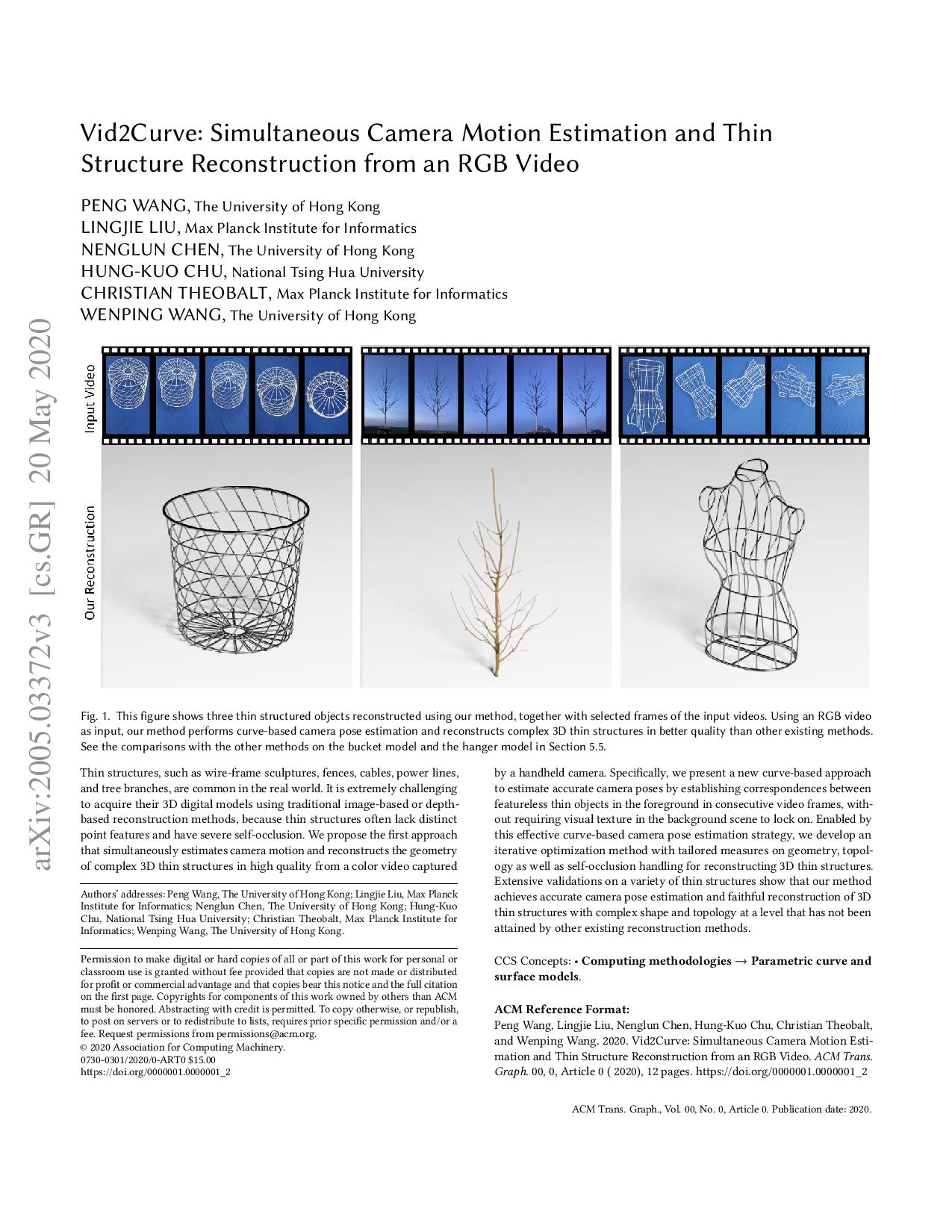
Vid2Curve: Simultaneous Camera Motion Estimation and Thin Structure Reconstruction from an RGB Video
the University of Hong Kong
Max-Planck-Institute for Informatics
the University of Hong Kong
National Tsinghua University
Max-Planck-Institute for Informatics
the University of Hong Kong
SIGGRAPH 2020


Paper
</Code>
Data